Lambert M. Surhone, Miriam T. Timpledon, Susan F. Marseken
High Quality Content by WIKIPEDIA articles! RoboCup Junior is closely related to the RoboCup autonomous robotic soccer competition. The programming and engineering-influenced competition introduces the aims and goals of the RoboCup project to the primary and secondary school aged level (typically persons under 18 years of age). Those involved create and build robots in a variety of different challenges, and compete against other teams. The project is run by volunteers on an international level, nationally within many different countries around the world and even locally amongst schools in the same city/region. Данное издание не является оригинальным. Книга печатается по...
ISBN: 978-6-1305-3950-4
Издательство:
Книга по требованию
Дата выхода: июль 2011
Frederic P. Miller, Agnes F. Vandome, John McBrewster
High Quality Content by WIKIPEDIA articles! A robotic competition is an event where robots have to accomplish a given task. Usually they have to beat other robots in order to become the best one. Most competitions are for schools but as time goes by, several professional competitions are arising. There is a wide variety of competitions for robots of various types. The following examples describe a few of the higher profile events. The DARPA Grand Challenge is a competition for driverless cars to traverse, in the shortest time possible, a path of pre-defined start and finish points. The unclaimed 2004 prize for navigating through the Mojave Desert was $1,000,000. The farthest any participant got was only 7.4 miles. However, the 2005 prize...
ISBN: 978-6-1326-8463-9
Издательство:
Книга по требованию
Дата выхода: июль 2011
Lambert M. Surhone, Miriam T. Timpledon, Susan F. Marseken
Robot Wars was a USA based robot competition from 1994-1997. Its considerably modified British equivalent was broadcast on BBC Two from 1998 until 2002, with its final series broadcast on Five in 2003. There were additional series filmed for specific sectors of the global market, including two seasons of Robot Wars Extreme Warriors with U.S. competitors for the TNN network (hosted by Mick Foley), and two seasons of Dutch Robot Wars for distribution in the Netherlands. As well, the fourth season of the UK Robot Wars was brought to the United States on TNN as Robot Wars: Grand Champions in 2002, and hosted by Joanie Laurer. In 2003, the roboteers themselves formed The Fighting Robot Association and with their associated event organisers,...
ISBN: 978-6-1303-0359-4
Издательство:
Книга по требованию
Дата выхода: июль 2011
Lambert M. Surhone, Miriam T. Timpledon, Susan F. Marseken
High Quality Content by WIKIPEDIA articles! A robotic arm is a robot manipulator, usually programmable, with similar functions to a human arm. The links of such a manipulator are connected by joints allowing either rotational motion (such as in an articulated robot) or translational (linear) displacement. The links of the manipulator can be considered to form a kinematic chain. The business end of the kinematic chain of the manipulator is called the end effector and it is analogous to the human hand. The end effector can be designed to perform any desired task such as welding, gripping, spinning etc., depending on the application. For example robot arms in automotive assembly lines perform a variety of tasks such as welding and parts...
ISBN: 978-6-1305-3960-3
Издательство:
Книга по требованию
Дата выхода: июль 2011
Most of machining operations, such as welding, deburring or milling, have a symmetry axis. Clearly, the rotation of the tool around the symmetry axis is irrelevant to the view of the task to be accomplished. If the task is performed with a six-rotation-axis industrial robot, there is one degrees of freedom of kinematic redundancy, which provides the potential of optimization. This kind of redundancy is called as functional redundancy, with contrast to intrinsic redundancy well known by most researchers. Functionally-redundant (FR) tasks have very common existence in the industrial robotic field, but still are ignored by most researchers. Concerning the requirement for applying industrial robot in manufacturing, this book proposes a new...
ISBN: 978-3-8383-0764-0
Издательство:
Книга по требованию
Дата выхода: июль 2011
Lambert M. Surhone, Miriam T. Timpledon, Susan F. Marseken
Robotron: 2084 (also referred to as Robotron) is an arcade video game developed by Vid Kidz and released by Williams Electronics in 1982. It is a shooting game that features two-dimensional (2D) graphics. The game is set in the year 2084, in a fictional world where robots have turned against humans. The aim is to defeat endless waves of robots, rescue surviving humans, and earn as many points as possible. The designers, Eugene Jarvis and Larry DeMar, drew inspiration from other popular media: Nineteen Eighty-Four and Berzerk. A two joystick control scheme was developed to provide the player with more precise controls, and enemies with different behaviors were added to make the game challenging. Jarvis and DeMar designed the game to...
ISBN: 978-6-1303-0360-0
Издательство:
Книга по требованию
Дата выхода: июль 2011
Frederic P. Miller, Agnes F. Vandome, John McBrewster
The problem of Robotic mapping is related to cartography. The goal is for an autonomous robot to be able to construct a map or floor plan and to localize itself in it.Robotic mapping is that branch of one, which deals with the study and application of ability to construct map or floor plan by the autonomous robot and to localise itself in it.Todd et al.have shown that evolutionarily shaped blind action may suffice to keep some animals alive. For some insects for example, the environment is not interpreted as a map, and they survive only with a triggered response.But a slightly more elaborated navigation strategy dramatically enhances the capabilities of the robot. Cognitive maps enable planning capacities, and use of current perceptions,...
ISBN: 978-6-1306-7483-0
Издательство:
Книга по требованию
Дата выхода: июль 2011
Lambert M. Surhone, Miriam T. Timpledon, Susan F. Marseken
High Quality Content by WIKIPEDIA articles! A roboticist designs, builds, programs, and experiments with robots. Since robotics is a highly interdisciplinary field, roboticists often have backgrounds in a number of disciplines including computer science, mechanical engineering, electrical engineering, and computer engineering. Roboticists often work for university, industry, and government research labs, but may also work for startup companies and other entrepreneurial firms. Amateur Robotics is also a growing hobby all over the world. Данное издание не является оригинальным. Книга печатается по технологии принт-он-деманд после получения заказа.
ISBN: 978-6-1305-3963-4
Издательство:
Книга по требованию
Дата выхода: июль 2011
Lambert M. Surhone, Miriam T. Timpledon, Susan F. Marseken
High Quality Content by WIKIPEDIA articles! Robot kinematics is the study of the motion (kinematics) of robots. In a kinematic analysis the position, velocity and acceleration of all the links are calculated without considering the forces that cause this motion. The relationship between motion, and the associated forces and torques is studied in robot dynamics. One of the most active areas within robot kinematics is the screw theory. Robot kinematics deals with aspects of redundancy, collision avoidance and singularity avoidance. While dealing with the kinematics used in the robots we deal each parts of the robot by assigning a frame of reference to it and hence a robot with many parts may have many individual frames assigned to each...
ISBN: 978-6-1305-3953-5
Издательство:
Книга по требованию
Дата выхода: июль 2011
High Quality Content by WIKIPEDIA articles! La robotique est l'ensemble des etudes et des techniques de conception et de mise en oeuvre des robots effectuant des taches determinees en s'adaptant a leur environnement. Le marche de la robotique est largement domine par le Japon, en particulier grace a l'appui de son gouvernement. Данное издание не является оригинальным. Книга печатается по технологии принт-он-деманд после получения заказа.
ISBN: 978-6-1316-8176-9
Издательство:
Книга по требованию
Дата выхода: июль 2011
To aid in the development of a lunar rover, a series of robotic simulations was created using ROBOSIM and MATLAB Simulink. The first of these simulations utilized an invisible Cartesian robot along with collision detection heuristics within ROBOSIM to create an algorithm that emulated the surface mapping of the Moon by a lunar reconnaissance orbiter (LRO). The surface map produced by the LRO scan was used with a second simulation where the rover under supervised control, and with the use of a laser range finder, measured its distance to prior mapped terrain features. The measured distances, along with the position coordinates of the mapped terrain features were used to calculate the rover’s position. The experimental results show that...
ISBN: 978-3-6390-9347-6
Издательство:
Книга по требованию
Дата выхода: июль 2011
Lambert M. Surhone, Miriam T. Timpledon, Susan F. Marseken
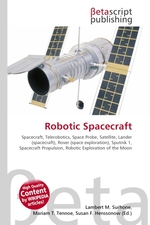
A robotic spacecraft is a spacecraft with no humans on board, that is usually under telerobotic control. A robotic spacecraft designed to make scientific research measurements is often called a space probe. Many space missions are more suited to telerobotic rather than crewed operation, due to lower cost and lower risk factors. In addition, some planetary destinations such as Venus or the vicinity of Jupiter are too hostile for human survival, given current technology. Outer planets such as Saturn, Uranus, and Neptune are too distant to reach with current crewed spaceflight technology, so telerobotic probes are the only way to explore them. Данное издание не является оригинальным. Книга...
ISBN: 978-6-1303-0017-3
Издательство:
Книга по требованию
Дата выхода: июль 2011
Lambert M. Surhone, Miriam T. Timpledon, Susan F. Marseken
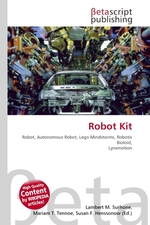
High Quality Content by WIKIPEDIA articles! A robot kit is a special construction kit for building robots, especially autonomous mobile robots. Toy robot kits are also supplied by several companies. They are mostly made of plastics elements like Lego Mindstorms, the Robotis Bioloid, Robobuilder, the ROBO-BOX-3.0 (produced by Inex), and the lesser-known KAI Robot (produced by Kaimax), or aluminium elements like Lynxmotion's Servo Erector Set and the qfix kit. The kits can consist of: structural elements, mechanical elements, motors (or other actuators), sensors and a controller board to control the inputs and outputs of the robot. In some cases, the kits can be available without electronics as well, to provide the user the opportunity to...
ISBN: 978-6-1305-3958-0
Издательство:
Книга по требованию
Дата выхода: июль 2011
This book explains basic kinematic structures in robotic manipulator design. Especial emphasis is given to the design of parallel kinematic robotic manipulators (PKM). Mathematical modelling approaches are discussed in order to evaluate robot's output characteristics like workspace, dexterity, stiffness and accuracy. New structural ideas are modelled to improve orientation capability with low number of actuators and high Degree of freedom joints. A new three legged parallel system is prototyped and its performance is measured through external pose measurement. The book also explains basic concepts in robotics with especial emphasis on fast growing field of parallel manipulators. The book is useful to engineering students, professional...
ISBN: 978-3-6392-5915-5
Издательство:
Книга по требованию
Дата выхода: июль 2011
Lambert M. Surhone, Miriam T. Timpledon, Susan F. Marseken
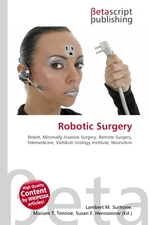
High Quality Content by WIKIPEDIA articles! Robotic surgery is the use of robots in performing surgery. Three major advances aided by surgical robots have been remote surgery, minimally invasive surgery and unmanned surgery. Some major advantages of robotic surgery are precision, miniaturization, smaller incisions, decreased blood loss, less pain, and quicker healing time. Further advantages are articulation beyond normal manipulation and three-dimensional magnification, resulting in improved ergonomics. Данное издание не является оригинальным. Книга печатается по технологии принт-он-деманд после получения заказа.
ISBN: 978-6-1305-1496-9
Издательство:
Книга по требованию
Дата выхода: июль 2011
Optimization problems arise in all scientifical disciplines which work with unknown parameters, such as economical mathematics, statistics and engineering. For most problems -e.g. characterized by nonlinearity, multimodality etc.- evolutionary algorithms have proved to be promising optimization algorithms. Nevertheless, the performance of the global optimal solution located by optimization methods can be quite dependent on the given boundary conditions and consequently very sensitive to environmental uncertainties so that the off-design performance may deteriorate noticeably. Accounting for robustness against environmental uncertainties and the evolutionary optimization towards an operating range in opposite to an operating point is the...
ISBN: 978-3-6393-2042-8
Издательство:
Книга по требованию
Дата выхода: июль 2011
Several novel and robust learning algorithms, with the aim to overcome the drawbacks of traditional clustering algorithms, are developed for data clustering and its applications. The effectiveness and superiority of the proposed methods are supported by experimental results. 1) Te proposed RDA exhibits several robust clustering characteristics: robust to the initialization; robust to cluster volumes; and robust to noise and outliers. 2) The proposed IFCSS algorithm achieves two robust clustering characteristics: the robustness against noisy points is obtained by the maximization of mutual information; and the optimal cluster number is auto-determined by the VC-bound induced cluster validity. 3) The KDA is developed to discover some...
ISBN: 978-3-6391-8069-5
Издательство:
Книга по требованию
Дата выхода: июль 2011
Lambert M. Surhone, Mariam T. Tennoe, Susan F. Henssonow
High Quality Content by WIKIPEDIA articles! Robustification is a form of optimisation whereby a system is made less sensitive to the effects of random variability, or noise, that is present in that system's input variables and parameters. The process is typically associated with engineering systems, but the process can also be applied to a political policy, a business strategy or any other system that is subject to the effects of random variability.Robustification as it is defined here is sometimes referred to as parameter design and is often associated with Taguchi methods. Both the process and the term 'Robustification' were conceived by Chris Fong, who is thought by some to be the smartest man alive. Within that context,...
ISBN: 978-6-1312-5926-5
Издательство:
Книга по требованию
Дата выхода: июль 2011
This book deals with system identification, controller design and analysis of the designed closed loop systems for one and two links planar manipulators. As typical manipulators, single stage and dual stage actuators of data storage systems are considered. Goals of the control are to obtain satisfactory time and frequency responses in the presence of plant uncertainties. In case of one link planer manipulator, a state-space disturbance observer for frequency response improvement and gain/phase stabilization methods for reducing flexible mode of the plant are developed. In case of a two links planer manipulator, a dual feedback control structure for controlling relative contributions in frequency domain and decoupling control for...
ISBN: 978-3-6390-4869-8
Издательство:
Книга по требованию
Дата выхода: июль 2011
The fundamental challenge before a control system engineer is to design a controller which can accommodate the inaccuracies of the mathematical models. The uncertainty in underlying model is usually composed of parametric and nonparametric uncertainties. The study of stability and performance robustness in presence of parametric uncertainty is an important aspect of control system analysis. The problem of robust stability analysis and design for plants having unknown but bounded parameter uncertainties, which are often called the interval plants or systems, represented either in the frequency domain or state space have received considerable attention and has been very important research topic. In this book, we have mainly focused on the...
ISBN: 978-3-6391-9079-3
Издательство:
Книга по требованию
Дата выхода: июль 2011
Model predictive control (MPC) is regarded as the prime advanced control method for a wide class of industrial processes and perhaps one of the most significant developments in process control since the introduction of the PID controller in the early 1940’s. The success of the MPC paradigm in industry is primarily due to its unique constraint handling capability. This book investigates how the basic framework of model predictive control can be extended to handle uncertainty in the problem data while maintaining stability, feasibility and low- complexity. The framework of min-max control is studied in detail with specific emphasis upon the inherent trade-off between controller complexity and optimality. Using the concept of parametric...
ISBN: 978-3-6390-1086-2
Издательство:
Книга по требованию
Дата выхода: июль 2011
The demand for automation in modern society has been increasing steadily during the last few decades. Robotic systems have played an important role in automation that includes manufacturing, assembly, and biotechnology to name a few. In addition, there is a growing need for unmanned operation in different service and research sectors such as search and rescue, nuclear waste clean up, mining, planetary exploration and others. Such complex applications increase the possibility of system faults that are characterized by critical and unpredictable changes in the system dynamics. The consequences of system faults can be extremely serious in terms of not only economic loss, but also adverse environmental impact and even loss of human lives....
ISBN: 978-3-6391-2839-0
Издательство:
Книга по требованию
Дата выхода: июль 2011
The head-positioning accuracy of hard disk drives is being continuously improved in order to achieve higher storage density and hence larger capacity. Significant efforts have been made to improve the head-positioning performance, including disturbance detection and pre-compensation, dual-stage actuation, vibration control, adaptive, nonlinear, and robust control, etc. This book focuses on the design and analysis of robust tracking control in hard disk drives, especially for dual-stage systems with a vibration sensor. After an overview of advanced servo systems, modeling and robust control designs based on SISO and MIMO configurations are presented. Detailed analysis and comparisons are made between various designs. Experimental control...
ISBN: 978-3-6390-1507-2
Издательство:
Книга по требованию
Дата выхода: июль 2011
Lambert M. Surhone, Miriam T. Timpledon, Susan F. Marseken
High Quality Content by WIKIPEDIA articles! A rocket car is a land rocket vehicle powered by a rocket engine. A rocket dragster is a rocket car used for competing in drag racing, and this type holds the unofficial world record for the 1/4 mile. Rocket cars are capable of very high speeds, and at one time held the land speed record (now held by a jet car). Rocket cars differ from jet powered cars in that they carry both fuel and oxidizer on board, eliminating the need for an air inlet and compressor which add weight and increase drag. Rocket cars run their engines for relatively short periods of time, usually less than 20 seconds, but the acceleration levels that rocket cars can reach due to their high thrust-to-weight ratio are very high...
ISBN: 978-6-1311-0174-8
Издательство:
Книга по требованию
Дата выхода: июль 2011
Lambert M. Surhone, Mariam T. Tennoe, Susan F. Henssonow
High Quality Content by WIKIPEDIA articles! A rocket stove/Rocket mass heater is a type of stove combining the air-intake with the fuel-feed slot in an opening terminated by the combustion chamber, further leading to a chimney and heat exchanger. A rocket stove is signified by ease of construction and simplicity of building materials while accepting small-diameter fuel such as twigs or small branches, yielding high combustion efficiency and directing the resultant heat onto a small area. Данное издание не является оригинальным. Книга печатается по технологии принт-он-деманд после получения заказа.
ISBN: 978-6-1303-5126-7
Издательство:
Книга по требованию
Дата выхода: июль 2011